卡片召唤师
精华
|
战斗力 鹅
|
回帖 0
注册时间 2019-8-9
|
开源技术在民用领域应用已久,在军事领域同样是众多第三世界国家和地方武装获得相对高科技武器装备的路线,在俄乌战争之前,使用开源算法的飞控,多频多模差分定位算法,图像识别算法就被很多地方武装使用在自己利用全球化供应链提供的民用器件生产的无人机,巡航和弹道导弹上。
基于开源协议,全世界最优秀的开发者都能参与其中,很多项目都使用了业界前沿的技术,为这些国家和武装提供了便利,这些技术本身定位就模军民棱两可,某种意义上为第三世界国家和地区武装实现了技术平权。
本文就以俄乌战争中使用最多的无人机,对几种开源算法和硬件做个简单介绍。
先上个思维导图
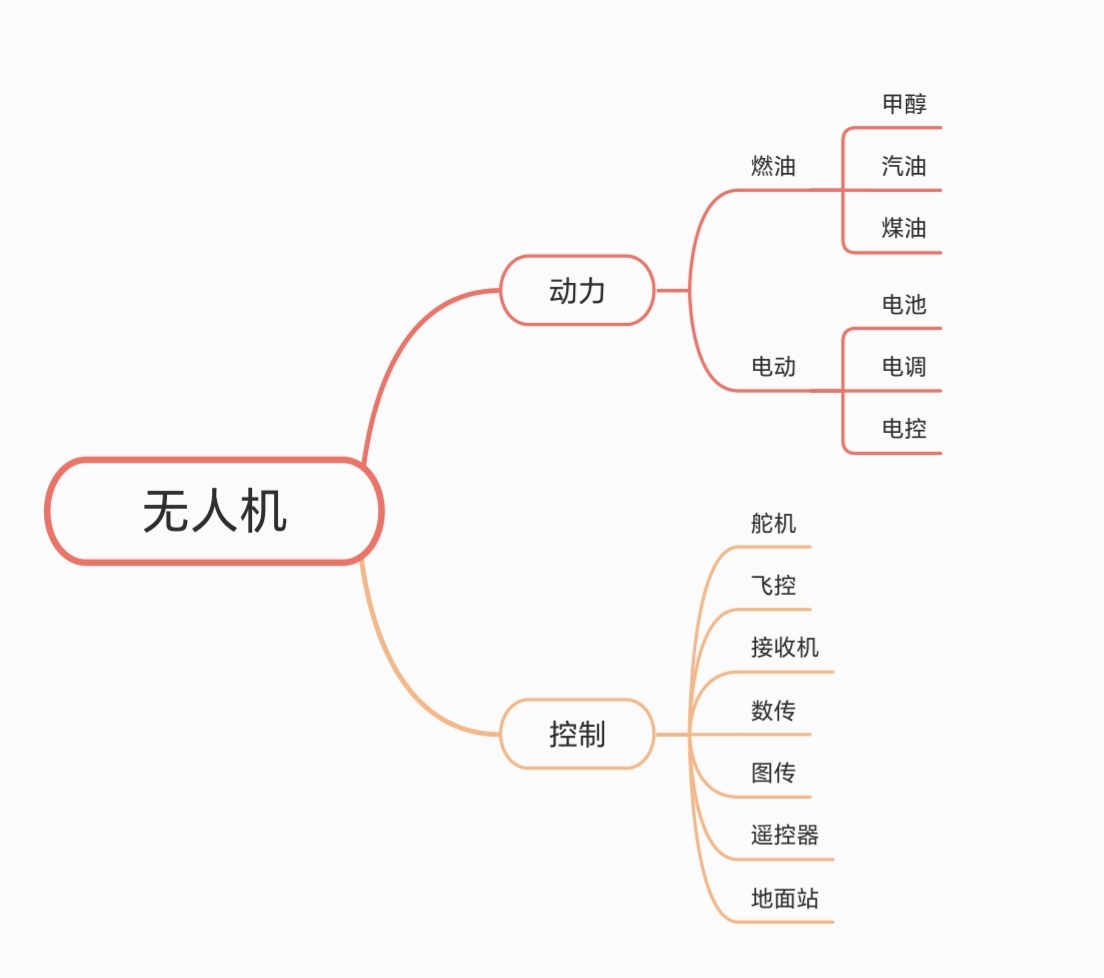
无人机的开源算法主要在飞控,RC,图传方面。主要为穿越机使用的,BEATFIGHT,INAV,大型固定翼或者多旋翼使用的ArduPilot,PX4。RC方面,基于黑羊crsf协议的elrs方案,图传5808/openhd/openvtx和opeipc。这些开源项目不但有软件,还有相应的开源硬件,让任何有条件的人都可以免费制造使用。
楼主玩电直时候多轴刚兴起当时主流的软硬件还是NAZE,KK,CC3D这些,依赖早期廉价陀螺仪和主控芯片,很快就被淘汰了。以俄乌战争最常见的fpv为例,使用betafight飞控系统(fork自cleanfight),基于stm32 F405/722主控设计的硬件,arduino/esp32+rx5808的图传(模拟),smt32/esp32+sx127x/sx1280的elrs无线控制系统,加上三电机架遥控就能飞了。
而比较大型的长航时无人机多用ArduPilot,PX4,这些飞控系统,开发时间长,开发者众多,算法先进复杂,传感器接口和硬件计算资源更强,基本上做无人机的肯定都会研究过这两个项目,固定翼,多轴,船舶,车辆都可以使用。基本上俄乌两边的无人机都有见到用apm/Pixhawk构型的飞控硬件。这两个系统也是正真意义上的飞控系统,链路协议,地面站成熟,定点,定高,gps航线飞行,rtk之类都能找到开发接口,地形匹配,用yolo之类人工智能图像识别寻的也有案例。实际上大疆出避障之前就有用ArduPilot和apm实现光流定高超声波避障的了。
……
懒癌发作,不想写了…等过完节再说,如果回到十几年前我好歹得水几篇论文。
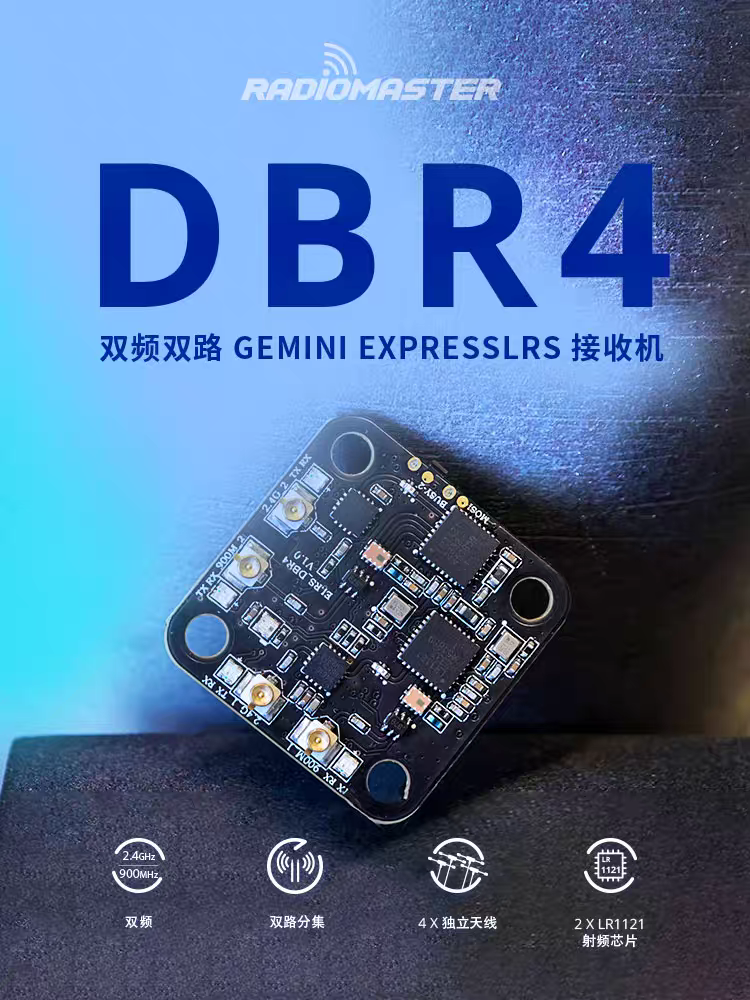
说下elrs/ExpressLRS,该项目使用廉价物联网方案提供了商业RC协议(黑羊crsf)的实现,更高刷新率更强的抗干扰能力,发这贴主要原因就是看到v3.3版本之后,在新硬件设计(使用lr1121射频方案)中,elrs支持双频真分集了,可以在915和2.4之间自动切换,虽然目前因为硬件限制HFSS(跳频)最高也才50hz/s,比不上军用设备的每秒几千次,但是对于俄乌这种两边电子战还在用噪声压制的绰绰有余。加上中国生产这一套也才600人民币不到,国外开发国内落地已经成了固定模式。

|
评分
-
查看全部评分
|

 发表于 2024-9-14 23:43
发表于 2024-9-14 23:43

 ,我说,那你淘宝买来的出了问题会给你开故障归零会吗
,我说,那你淘宝买来的出了问题会给你开故障归零会吗 。
。